
|
Drone et vision des insectespar Thomas Netter, e-mail: tnetter at ini.unizh.chUn robot volant avec un oeil neuromorphique |
English version
Tťlťcharger article de confťrence IROS'02 (anglais) [A4]
Vidťo d'ťvitement d'obstacles: [AVI Video 6
Mbytes]
![]()
(Utilisateurs linux: Codec = Radius Cinepak, visualisable avec
xanim, xine, mplayer)
 Les insectes volants dťpendent de leur oeil panoramique et du Flux
Optique pour le guidage et l'ťvitement d'obstacles. La fusion des sens
visuels, inertiels et aťrodynamiques est remarquable chez la
mouche. L'ťtude comportementale et neurophysiologique de la mouche a
inspirť la recherche en Intelligence Artificielle et la construction
de robots autonomes. Les recherches sur le systŤme visuo-moteur de la
mouche de l'ťquipe de
Neurocybernťtique du Laboratoire de Neurobiologie du CNRS ŗ
Marseille, ont menť au dťveloppement de deux robots mobiles
possťdant un systŤme visuel en ťlectronique analogique basť sur des
Dťtecteurs …lťmentaires de Mouvement (DEM) s'inspirant de ceux de la
mouche.
Les insectes volants dťpendent de leur oeil panoramique et du Flux
Optique pour le guidage et l'ťvitement d'obstacles. La fusion des sens
visuels, inertiels et aťrodynamiques est remarquable chez la
mouche. L'ťtude comportementale et neurophysiologique de la mouche a
inspirť la recherche en Intelligence Artificielle et la construction
de robots autonomes. Les recherches sur le systŤme visuo-moteur de la
mouche de l'ťquipe de
Neurocybernťtique du Laboratoire de Neurobiologie du CNRS ŗ
Marseille, ont menť au dťveloppement de deux robots mobiles
possťdant un systŤme visuel en ťlectronique analogique basť sur des
Dťtecteurs …lťmentaires de Mouvement (DEM) s'inspirant de ceux de la
mouche.
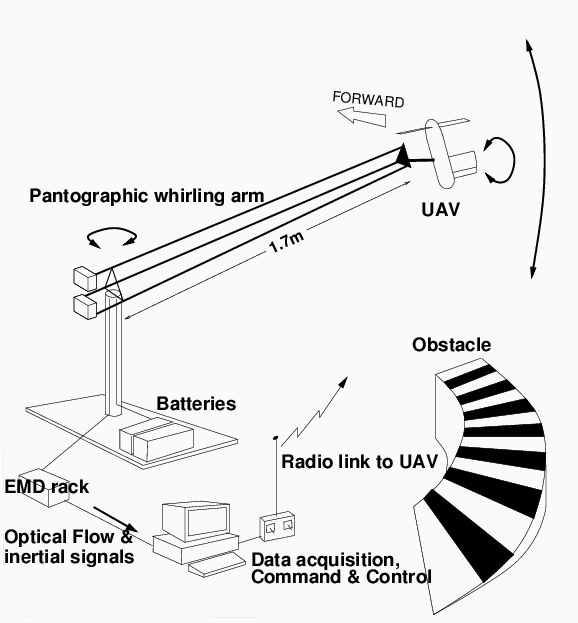
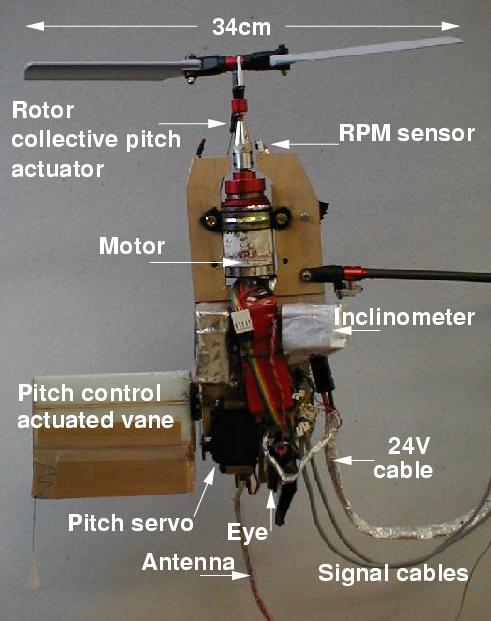 Le drone mini-hťlicoptŤre (35 cm, 0.840 kg), appelť Fania, a ťtť conÁu
et construit pour ťtudier les fonctions de suivi de terrain et
d'ťvitement d'obstacle ŗ l'aide d'un systŤme visuel de dťtection du
mouvement. L'ťtude aťrodynamique fait correspondre la motorisation
ťlectrique avec une propulsion vectorielle. L'aťronef est liť ŗ un
bras tournant limitant le vol ŗ 3 degrťs de libertť ŗ l'aide du
contrŰle de la poussťe et du tangage.
Le drone mini-hťlicoptŤre (35 cm, 0.840 kg), appelť Fania, a ťtť conÁu
et construit pour ťtudier les fonctions de suivi de terrain et
d'ťvitement d'obstacle ŗ l'aide d'un systŤme visuel de dťtection du
mouvement. L'ťtude aťrodynamique fait correspondre la motorisation
ťlectrique avec une propulsion vectorielle. L'aťronef est liť ŗ un
bras tournant limitant le vol ŗ 3 degrťs de libertť ŗ l'aide du
contrŰle de la poussťe et du tangage.
Les 20 photorťcepteurs de l'oeil du robot volant perÁoivent le dťplacement des contrastes gr‚ce ŗ 19 DEM neuromorphiques placťs dans un rack au sol. Les signaux visuels, inertiels et tachymťtriques de l'aťronef sont numťrisťs par l'ordinateur de vol (systŤme Linux Temps-Rťel). Une fusion des signaux visuels par moyenne pondťrťe est utilisťe pour commander la poussťe. Un contrŰleur PID rťgule le tangage. Les commandes de vol sont transmises via un micro-contrŰleur interfacť ŗ un ťmetteur de radio-commande.
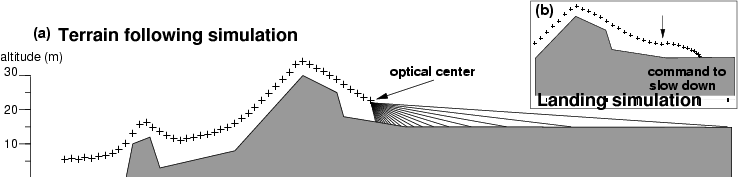
Le suivi de terrain et l'atterrissage par guidage visuel ont ťtť simulťs. Des dťmonstrations en vol d'ťvitement d'obstacles ŗ 2 m/s ont ťtť effectuťes au laboratoire. Ce projet de drone (UAV) est ŗ l'intersection de la neurobiologie, la robotique et l'aťronautique. Il fournit des technologies pour l'opťration urbaine de micro-aťronefs (MAV).

Projets se rapportant au vol avec vision biomimťtique
Biorobotic Vision Laboratory (Srinivasan Lab), ANU, CanberraCenteye, Washington DC
Dickinson Lab, Caltech, Pasadena
Autonomous Systems Lab, EPFL, Lausanne
Artificial Intelligence Lab, University of ZŁrich
Hans van Hateren's Lab, University of Groningen
Insect vision and motion detection at Institute of Neuroinformatics
Tobi DelbrŁckGiacomo Indiveri
Shih-Chii Liu
JŲrg Kramer