
|
UAV and insect visionby Thomas Netter, Aerospace and Robotics engineer [read resumé] A robot that flies with a
|
Download IROS'02 paper [A4],
[US letter] PDF 212Kb
Watch it avoid obstacles: [AVI Video 6
Mbytes]![]()
(Linux users: Codec = Radius Cinepak, viewable with xanim, xine,
mplayer)
 Flying insects rely on their panoramic eye and Optic Flow for guidance
and obstacle avoidance. Furthermore, flies bear remarkable neural
fusing of visual, inertial, and aerodynamic senses. Behavioural and
neurophysiological studies of insects have inspired research in
Artificial Intelligence and the construction of many autonomous
robots. This flying robot was built within the Neurocybernetics
Group of the Laboratory of Neurobiology, CNRS, Marseilles, France.
Previous research on the visuo-motor system of the fly had led to the
development of two mobile robots which feature an analogue electronic
vision system based on Elementary Motion Detectors (EMD) derived from
those of the fly.
Flying insects rely on their panoramic eye and Optic Flow for guidance
and obstacle avoidance. Furthermore, flies bear remarkable neural
fusing of visual, inertial, and aerodynamic senses. Behavioural and
neurophysiological studies of insects have inspired research in
Artificial Intelligence and the construction of many autonomous
robots. This flying robot was built within the Neurocybernetics
Group of the Laboratory of Neurobiology, CNRS, Marseilles, France.
Previous research on the visuo-motor system of the fly had led to the
development of two mobile robots which feature an analogue electronic
vision system based on Elementary Motion Detectors (EMD) derived from
those of the fly.
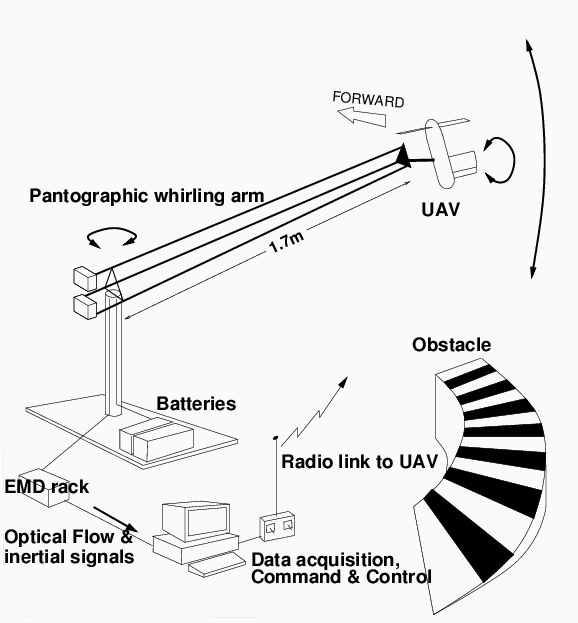
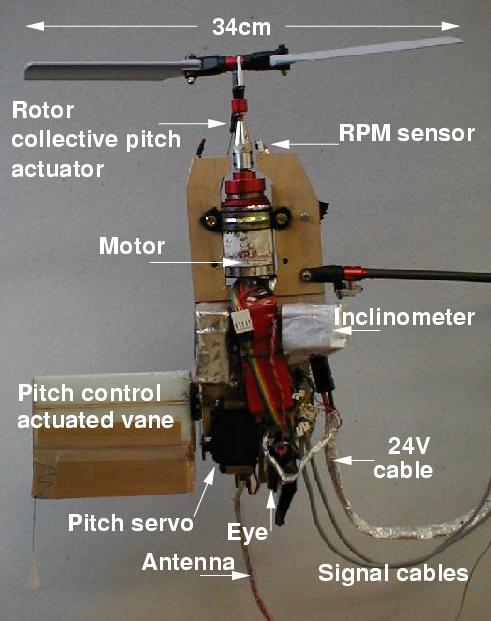 A tethered Unmanned Air Vehicle (UAV), called Fania, was developed to
study Nap-of-the-Earth (NOE) flight (terrain following) and obstacle
avoidance using a motion sensing visual system. After an aerodynamic
study, Fania was custom-built as a miniature (35 cm, 0.840 kg),
electrically-powered, thrust-vectoring rotorcraft. It is constrained
by a whirling-arm to 3 degrees of freedom with pitch and thrust
control.
A tethered Unmanned Air Vehicle (UAV), called Fania, was developed to
study Nap-of-the-Earth (NOE) flight (terrain following) and obstacle
avoidance using a motion sensing visual system. After an aerodynamic
study, Fania was custom-built as a miniature (35 cm, 0.840 kg),
electrically-powered, thrust-vectoring rotorcraft. It is constrained
by a whirling-arm to 3 degrees of freedom with pitch and thrust
control.
The robotic aircraft's 20-photoreceptor onboard eye senses moving contrasts with 19 ground-based neuromorphic EMDs. Visual, inertial, and tachymeter signals from the aircraft are scanned by a data acquisition board in the flight control computer which runs the Real-Time Linux operating system. A weighted average fusion of the visual inputs is used to command thrust. A PID controller regulates pitch. Flight commands are output via the parallel port to a microcontroller interfacing with a standard radio-control model transmitter.
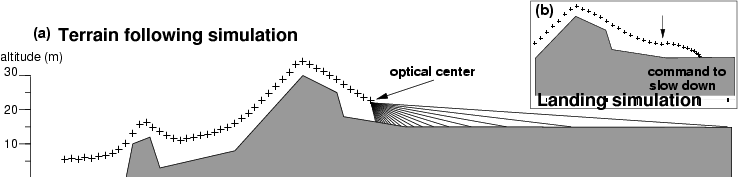
Vision-based terrain following (a) and landing (b) were simulated. Automatic obstacle-avoiding flights at speeds between 2 m/s and 3 m/s were demonstrated within the laboratory. This UAV project is at the intersection of Neurobiology, Robotics, and Aerospace. It provides principles and technology to assist urban operations of Micro Air Vehicles (MAV).

Related projects for flight with insect vision
Biorobotic Vision Laboratory (Srinivasan Lab), ANU, CanberraCenteye, Washington DC
Dickinson Lab, Caltech, Pasadena
Autonomous Systems Lab, EPFL, Lausanne
Artificial Intelligence Lab, University of Zürich
Hans van Hateren's Lab, University of Groningen
Insect vision and motion detection at Institute of Neuroinformatics
Tobi DelbrückGiacomo Indiveri
Shih-Chii Liu
Jörg Kramer